
新闻中心
从2018年开始,应多个主机厂和ADAS系统商的测试和共同开发邀请,行易道配合客户就支持ADAS和/或L3级ADS的77GHz近程毫米波雷达进行定制开发和共同展开了大量的试验场地测试和路试。行易道77GHz车载近程毫米波雷达的目标检测能力和跟踪结果以其精准性和稳定性获得了客户的正向反馈,与国际同级别近程雷达性能相当。
足以支持L3或更高级别驾驶辅助系统的四角近程毫米波雷达应达到哪些标准呢?
行易道在长期的系统联合测试中发现,L3或更高级别驾驶辅助系统对近程雷达的要求已提升到了一个新的高度。首先,传统的24GHz毫米波雷达很难满足新的要求。而对更有优势的77GHz近程毫米波雷达在目标信息输出的多级别、多维度等方面的要求也很严格。接下来将从近程毫米波雷达的车载应用和高标准的近程毫米波雷达性能表现等几个角度出发,逐步揭秘L3或更高级别驾驶辅助系统对近程雷达的要求。
近程毫米波雷达车载应用
近程毫米波雷达通常被安装在汽车后部两个角或汽车前后四个角,用于探测自车后方和侧后方或前方横向道路目标的运动情况,并通过软件算法对进入探测区域的目标和碰撞风险进行判断,以声音和视觉形式对驾驶员进行警示,或触发紧急制动。在L3自动驾驶中,在绝大部分环境条件和行驶条件下,稳定和精准的环境监控为自动驾驶系统提供了安全冗余。高标准的环境监控对感知系统融合提出了要求,因而毫米波雷达的目标探测覆盖范围、多级别和多维度的目标信息获取等成为衡量是否满足要求的标准。近程毫米波雷达在L3自动驾驶中安装在汽车四角,形成360度无盲区检测;同时,对近程毫米波雷达的速度分辨率、速度精度、角度分辨率、角度精度等核心技术参数要求更高。
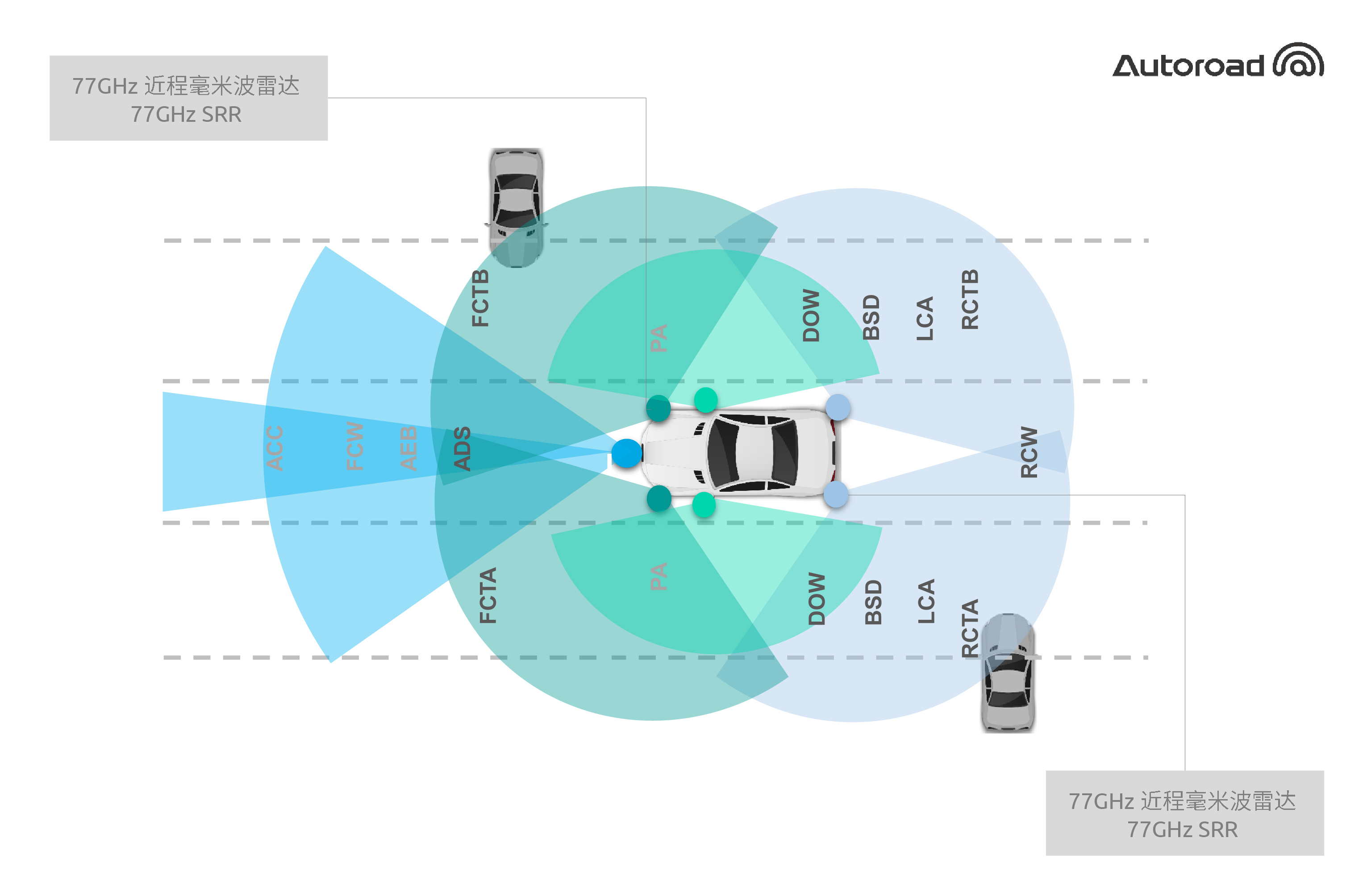
图1:行易道77GHz近程毫米波雷达支持ADAS和ADS
低成本高性能的行易道77GHz近程毫米波雷达
第一,77GHz频段实现了更高的速度分辨率和精度,通过高载频、大带宽可实现更高的距离分辨率和精度;
第二,3发4收的射频方案实现更高的角度分辨率和精度,提升对横向交通的检测精度;
第三,实现水平150°、距离100米范围内的目标检测和跟踪,既满足了对探测距离的要求,也满足了360度无盲区检测需求;
第四,车规级雷达产品,IP67防水防尘设计,采用全塑料外壳一体化轻量化设计,体积小巧安装友好。

图2:行易道77GHz毫米波雷达ASRR100产品外观图和主要技术参数
满足L3的高标准近程毫米波雷达
前角雷达的应用
目前含ADAS功能的面市车型较多安装选用两个后角雷达来实现后方碰撞预警、变道辅助、盲点检测等ADAS功能,而四个前后角雷达的适配在包含L2.5、L3自动驾驶的车型中被更多采用。前角雷达主要负责检测由近及远的车辆或者横向的车辆或行人,即在距离本车较近的区域内检测到目标并及时建立目标轨迹。这一应用对近程雷达的分辨率和精度、处理能力和算法方案提出了更高的要求,以获得更精准的检测和跟踪能力。
融合感知对雷达检测的要求
四角近程雷达在L3自动驾驶中的应用,对近程雷达的视场角覆盖范围要求较高,比如要求水平视场角不小于±75°,同时检测距离也需要大于等于100米。在满足360度无盲区雷达检测的同时,自动驾驶系统为了获得足够的感知融合信息,对雷达输出目标信息的多级别和多维度方面也提出了相应的要求。行易道77GHz近程毫米波雷达ASRR100可支持输出不同级别的目标信息,包括跟踪目标、聚类目标等;同时,可支持输出更多维度的目标信息,包括方差、协方差、生命周期、置信度、目标分类、目标尺寸等。最后,通过四个角雷达的信息融合,可实现多个雷达的空间同步和时钟同步,在不同雷达重叠的覆盖区域内完成目标关联,从而实现汽车四周近距离目标检测无盲区,同时提升输出信息的精准度。
近程成像雷达支持自动泊车
高等级自动泊车对感知设备在各种环境和场景中的普适性和成本提出了要求。行易道77/79GHz近程SAR成像雷达(SSAR),应用FMCW-SAR(调频连续波-合成孔径雷达)技术,通过安装在汽车两个前角实现道路前侧方路边场景的实时二维成像和前方横向交通目标检测。SAR作为前角近程雷达的一种功能模式,为高级别自动驾驶输出道路特征、车位状态等丰富信息并加强了雷达支持前方横向交通碰撞预警/制动(FCTA/B)的能力。SAR成像模式完成实时成像以及车位检测,为自动泊车系统输出信息,包括局部地图、定位、车位状态以及本车位置等。
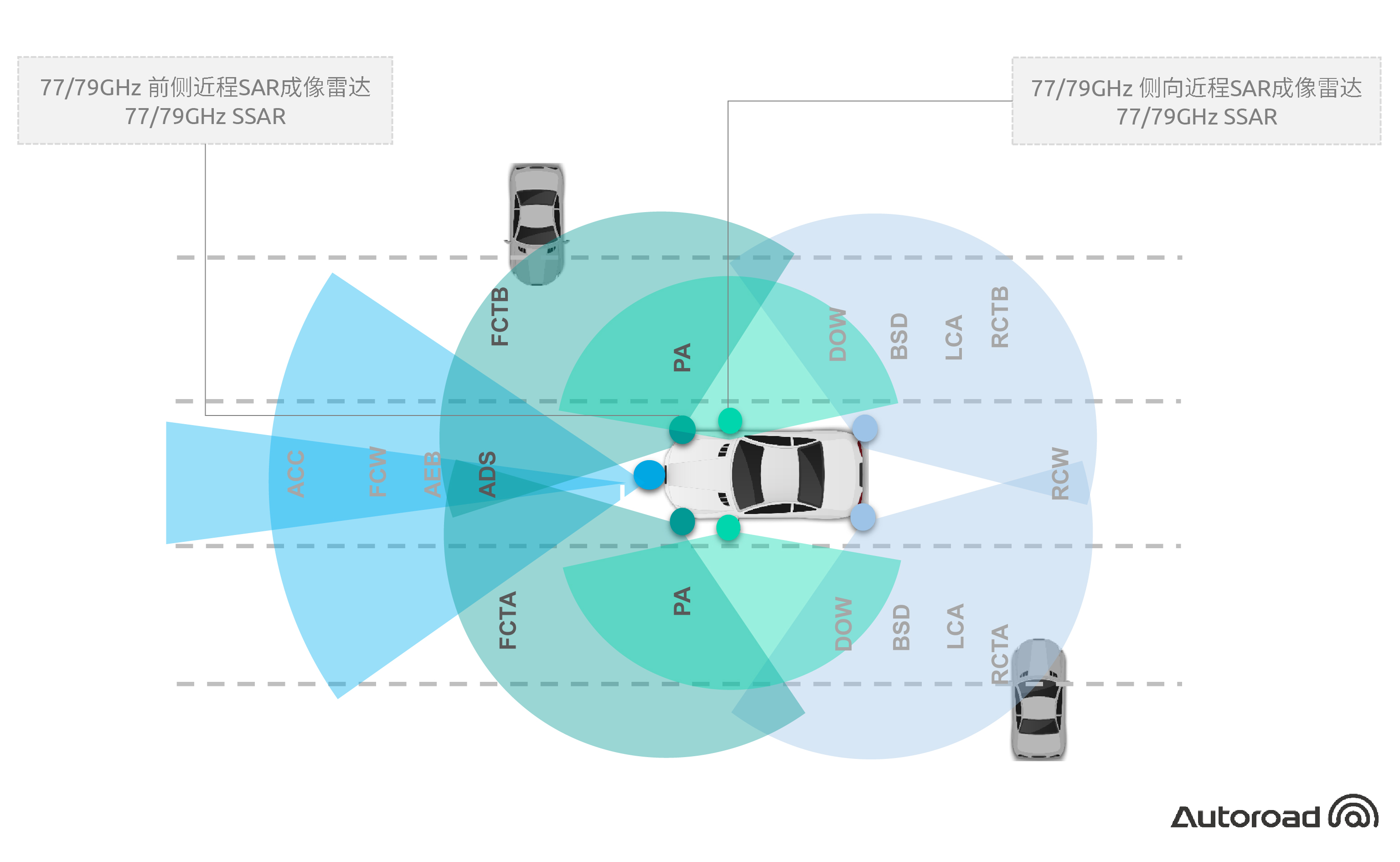
图3:行易道77/79GHz SSAR支持PA、FCTA/B等
基于车载SSAR系统的智能车位检测方案能够以相对较低成本提供高分辨率的雷达成像,并且自动车位识别没有车速、车距、车位类型的限定,泊车场景可以扩展到住宅小区、路边停车、空旷停车场等。
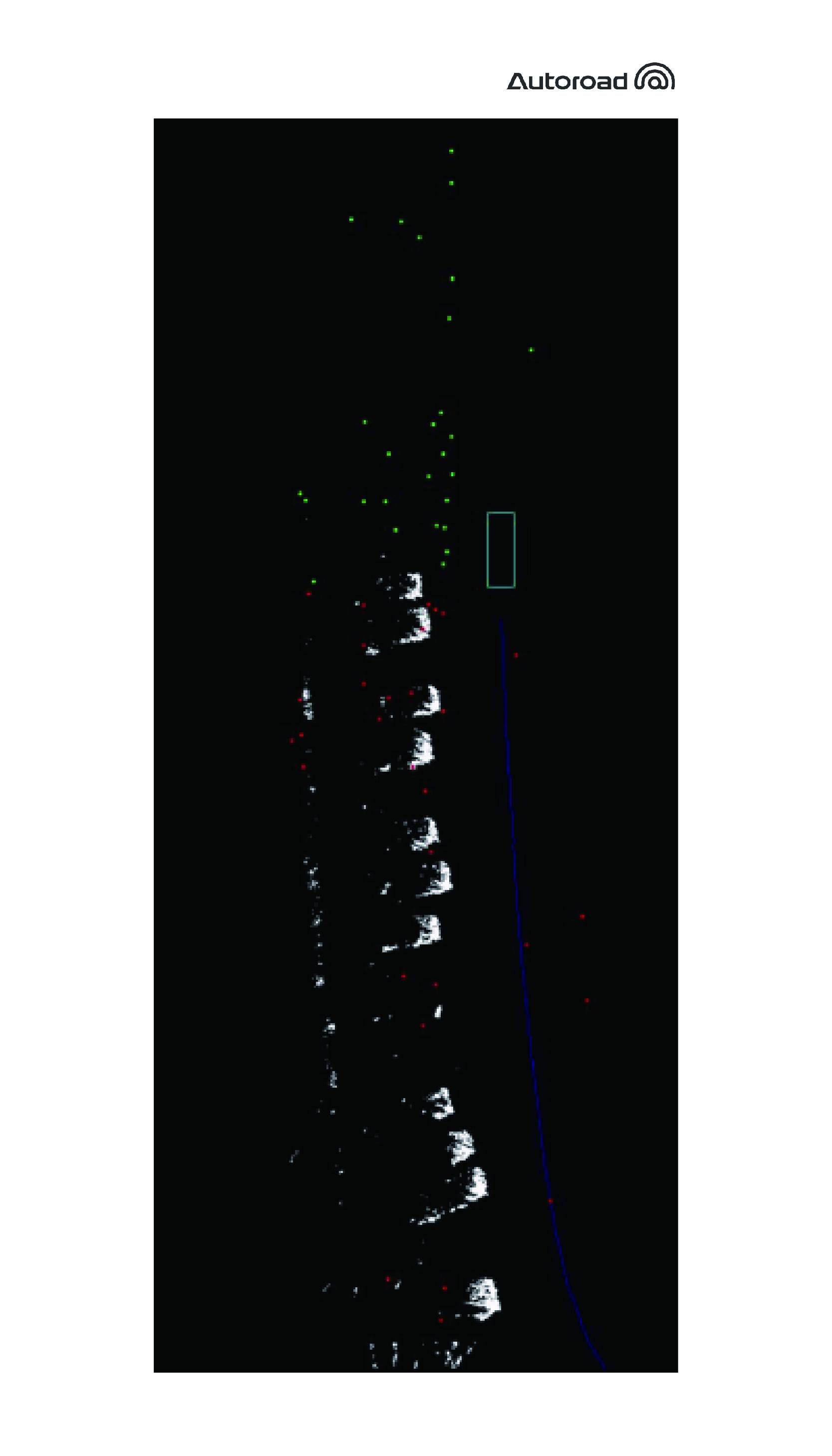
图4:行易道77/79GHz SSAR实测上位机图像 - 点云图像和点目标两种模式融合

 官方微信
官方微信
